







बाएँ हाथ का नियम, दाएँ हाथ का नियम, दाएँ हाथ का पेंच नियम।बाएँ हाथ का नियम, यह मोटर घूर्णन के बल के विश्लेषण का आधार है।सीधे शब्दों में कहें तो यह चुंबकीय क्षेत्र में करंट ले जाने वाला कंडक्टर है, जो बल से प्रभावित होगा।
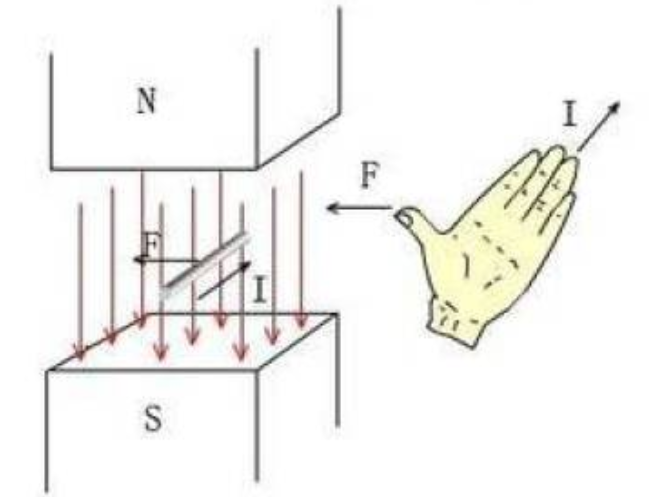
मान लीजिए कि चुंबकीय क्षेत्र रेखा हथेली के सामने से गुजरती है, उंगलियों की दिशा धारा की दिशा है, और अंगूठे की दिशा चुंबकीय बल की दिशा है।बल का कर्षण इलेक्ट्रोमोटिव बल उत्पन्न करने के लिए चुंबकीय क्षेत्र रेखाओं को काटता है।
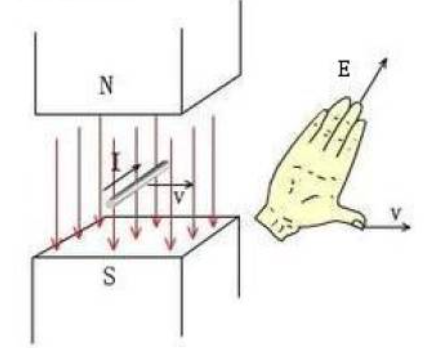
मान लीजिए कि चुंबकीय क्षेत्र रेखा हथेली से गुजरती है, अंगूठे की दिशा गति की दिशा है, और उंगली की दिशा उत्पन्न इलेक्ट्रोमोटिव बल की दिशा है।प्रेरित इलेक्ट्रोमोटिव बल के बारे में बात क्यों करें?मुझे नहीं पता कि क्या आपके पास भी ऐसा कोई अनुभव है।जब आप मोटर के तीन-चरण तारों को जोड़ते हैं और मोटर को हाथ से घुमाते हैं, तो आप पाएंगे कि प्रतिरोध बहुत बड़ा है।ऐसा इसलिए है क्योंकि मोटर के घूमने के दौरान इंडक्शन होता है।इलेक्ट्रोमोटिव बल करंट उत्पन्न करता है, और चुंबकीय क्षेत्र में कंडक्टर के माध्यम से प्रवाहित होने वाला करंट रोटेशन की दिशा के विपरीत एक बल उत्पन्न करेगा, और हर किसी को लगेगा कि रोटेशन के लिए बहुत अधिक प्रतिरोध है।
तीन चरण के तार अलग हो जाते हैं और मोटर को आसानी से घुमाया जा सकता है
तीन-चरण लाइनें संयुक्त हैं, और मोटर का प्रतिरोध बहुत बड़ा है।दाहिने हाथ के पेंच नियम के अनुसार, ऊर्जावान सोलनॉइड को दाहिने हाथ से पकड़ें, ताकि चार उंगलियां करंट की दिशा में एक ही दिशा में मुड़ें, फिर अंगूठे द्वारा इंगित किया गया सिरा ऊर्जावान सोलनॉइड का एन ध्रुव है।
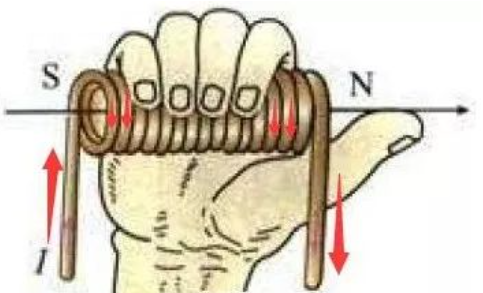
यह नियम ऊर्जावान कुंडल की ध्रुवीयता को पहचानने का आधार है, और लाल तीर की दिशा वर्तमान दिशा है।तीन नियमों को पढ़ने के बाद, आइए मोटर रोटेशन के बुनियादी सिद्धांतों पर एक नज़र डालें।पहला भाग: डीसी मोटर मॉडल हमें डीसी मोटर का एक मॉडल मिलता है जिसका अध्ययन हाई स्कूल भौतिकी में किया गया है, और चुंबकीय सर्किट विश्लेषण विधि के माध्यम से एक सरल विश्लेषण करते हैं।
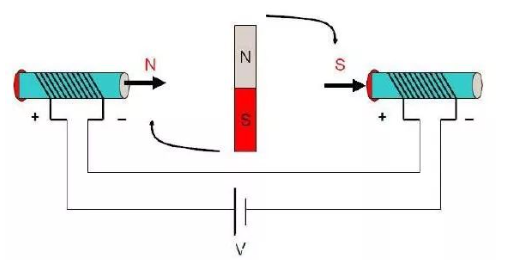
स्थिति 1 जब दोनों सिरों पर कॉइल पर करंट लगाया जाता है, तो दाएं हाथ के पेंच नियम के अनुसार, एक लागू चुंबकीय प्रेरण तीव्रता बी (जैसा कि मोटे तीर द्वारा दिखाया गया है) उत्पन्न होगी, और बीच में रोटर बनाने की कोशिश करेगा जहाँ तक संभव हो इसकी आंतरिक चुंबकीय प्रेरण रेखा की दिशा।बाहरी चुंबकीय क्षेत्र रेखा की दिशा सबसे छोटी बंद चुंबकीय क्षेत्र रेखा लूप बनाने के लिए सुसंगत है, ताकि आंतरिक रोटर दक्षिणावर्त घूम सके।जब रोटर के चुंबकीय क्षेत्र की दिशा बाहरी चुंबकीय क्षेत्र की दिशा के लंबवत होती है, तो रोटर का घूर्णी बलाघूर्ण सबसे बड़ा होता है।ध्यान दें कि "क्षण" को सबसे बड़ा कहा जाता है, "बल" को नहीं।यह सच है कि जब रोटर का चुंबकीय क्षेत्र बाहरी चुंबकीय क्षेत्र के समान दिशा में होता है, तो रोटर पर चुंबकीय बल सबसे बड़ा होता है, लेकिन इस समय रोटर क्षैतिज स्थिति में होता है और बल भुजा 0 होती है, और का बेशक यह घूमेगा नहीं.जोड़ने के लिए, क्षण बल और बल भुजा का गुणनफल है।यदि उनमें से एक शून्य है, तो उत्पाद शून्य है।जब रोटर क्षैतिज स्थिति में बदल जाता है, हालांकि यह अब घूर्णी टोक़ से प्रभावित नहीं होता है, यह जड़ता के कारण दक्षिणावर्त घूमता रहेगा।इस समय, यदि दो सोलनॉइड की वर्तमान दिशा बदल दी जाती है, जैसा कि नीचे दिए गए चित्र में दिखाया गया है, तो रोटर घूमता रहेगा।दक्षिणावर्त दिशा में आगे बढ़ें,
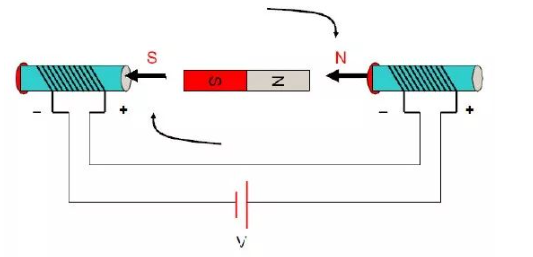
अवस्था 2 में, दो सोलनॉइड की वर्तमान दिशा लगातार बदलती रहती है, और आंतरिक रोटर घूमता रहेगा।धारा की दिशा बदलने की इस क्रिया को कम्यूटेशन कहा जाता है।एक साइड नोट: कब कम्यूटेट करना है यह केवल रोटर की स्थिति से संबंधित है और सीधे तौर पर किसी अन्य मात्रा से संबंधित नहीं है।भाग 2: तीन-चरण दो-पोल आंतरिक रोटर मोटर सामान्यतया, स्टेटर की तीन-चरण वाइंडिंग में स्टार कनेक्शन मोड और डेल्टा कनेक्शन मोड होता है, और "तीन-चरण स्टार कनेक्शन के दो-दो चालन मोड" सबसे आम है प्रयुक्त, जिसका प्रयोग यहाँ किया गया है।इस मॉडल का उपयोग सरल विश्लेषण के लिए किया जाता है।
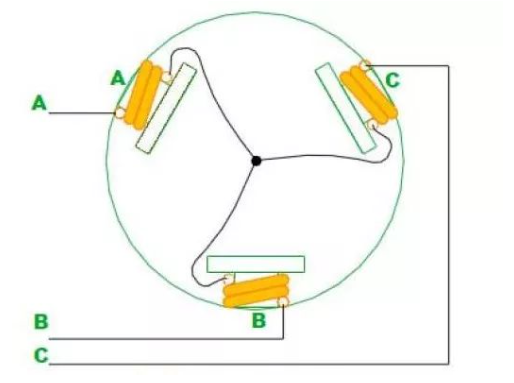
ऊपर दिया गया चित्र दिखाता है कि स्टेटर वाइंडिंग कैसे जुड़े हुए हैं (रोटर को एक काल्पनिक दो-ध्रुव चुंबक के रूप में नहीं दिखाया गया है), और तीन वाइंडिंग केंद्रीय कनेक्शन बिंदु के माध्यम से "Y" आकार में एक साथ जुड़े हुए हैं।पूरी मोटर तीन तारों ए, बी, सी की ओर जाती है। जब उन्हें दो-दो करके सक्रिय किया जाता है, तो 6 मामले होते हैं, अर्थात् एबी, एसी, बीसी, बीए, सीए, सीबी।ध्यान दें कि यह क्रम में है.
अब मैं पहले चरण को देखता हूं: एबी चरण सक्रिय है
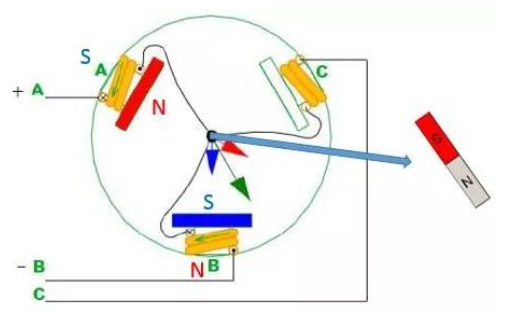
जब एबी चरण सक्रिय होता है, तो ए पोल कॉइल द्वारा उत्पन्न चुंबकीय क्षेत्र रेखा की दिशा लाल तीर द्वारा दिखाई जाती है, और बी पोल द्वारा उत्पन्न चुंबकीय क्षेत्र रेखा की दिशा नीले तीर द्वारा दिखाई जाती है, फिर दिशा परिणामी बल को हरे तीर द्वारा दिखाया गया है, फिर यह मानते हुए कि दो-ध्रुव चुंबक है, एन-पोल दिशा हरे तीर द्वारा दिखाई गई दिशा के साथ मेल खाएगी, "बीच में रोटर रखने की कोशिश करेगा" इसकी आंतरिक चुंबकीय क्षेत्र रेखाओं की दिशा बाहरी चुंबकीय क्षेत्र रेखाओं की दिशा के अनुरूप होती है।जहां तक सी की बात है तो फिलहाल उसका उससे कोई लेना-देना नहीं है।
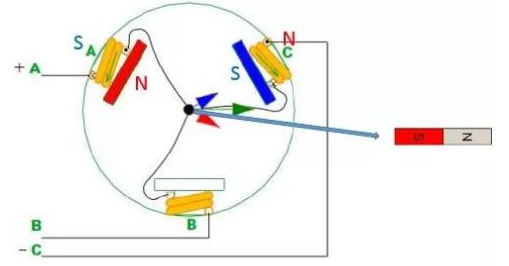
चरण 2: एसी चरण सक्रिय
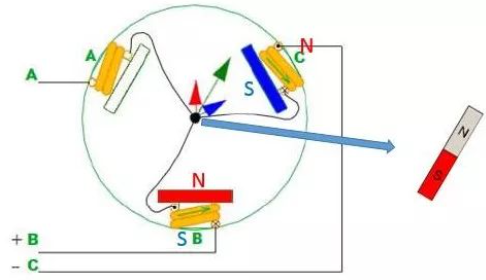
तीसरा चरण: बीसी चरण विद्युतीकरण
तीसरा चरण: बीए चरण ऊर्जावान है
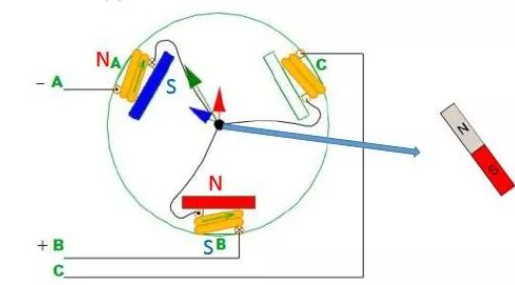
मध्यवर्ती चुंबक (रोटर) का स्थिति आरेख निम्नलिखित है: प्रत्येक प्रक्रिया रोटर 60 डिग्री घूमता है

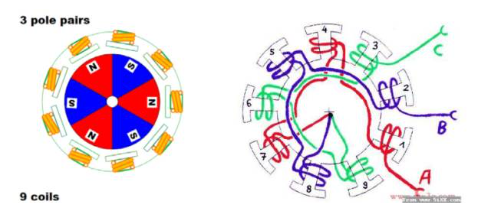
पूरा रोटेशन छह प्रक्रियाओं में पूरा होता है, जिनमें से छह कम्यूटेशन किए जाते हैं।तीसरा भाग: तीन-चरण मल्टी-वाइंडिंग मल्टी-पोल इनर रोटर मोटर आइए एक अधिक जटिल बिंदु पर नजर डालें।चित्र (ए) एक तीन-चरण नौ-घुमावीय छह-पोल (तीन-चरण, नौ-घुमावीय, छह-पोल) मोटर है।विपरीत ध्रुव) आंतरिक रोटर मोटर, इसका घुमावदार कनेक्शन चित्र (बी) में दिखाया गया है।चित्र (बी) से यह देखा जा सकता है कि तीन-चरण वाइंडिंग भी मध्यवर्ती बिंदु पर एक साथ जुड़े हुए हैं, जो एक स्टार कनेक्शन भी है।सामान्यतया, मोटर की वाइंडिंग की संख्या स्थायी चुंबक ध्रुवों की संख्या के साथ असंगत होती है (उदाहरण के लिए, 6 वाइंडिंग और 6 ध्रुवों के बजाय 9 वाइंडिंग और 6 ध्रुवों का उपयोग किया जाता है), ताकि स्टेटर के दांतों को रोका जा सके और रोटर के चुम्बकों को आकर्षित करने और संरेखित करने से।
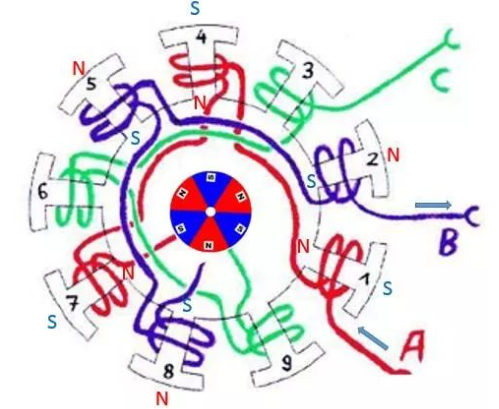
इसकी गति का सिद्धांत है: रोटर के एन ध्रुव और सक्रिय वाइंडिंग के एस ध्रुव में संरेखित होने की प्रवृत्ति होती है, और रोटर के एस ध्रुव और सक्रिय वाइंडिंग के एन ध्रुव में संरेखित होने की प्रवृत्ति होती है।अर्थात S और N एक दूसरे को आकर्षित करते हैं।ध्यान दें कि यह पिछली विश्लेषण पद्धति से भिन्न है।खैर, चलिए फिर से इसका विश्लेषण करने में आपकी मदद करते हैं।पहला चरण: एबी चरण विद्युतीकृत है
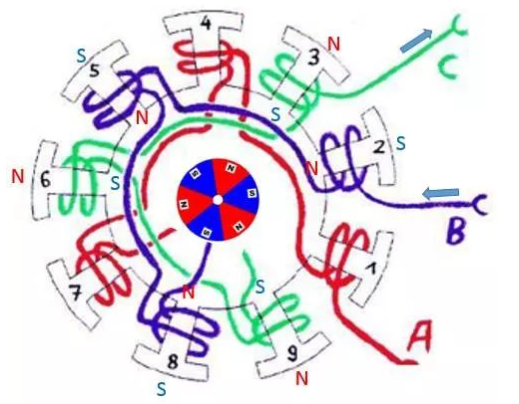
चरण 2: एसी चरण सक्रिय

तीसरा चरण: बीसी चरण विद्युतीकरण
पोस्ट करने का समय: अक्टूबर-21-2022